ビジネス
2022/11/7 [MON]
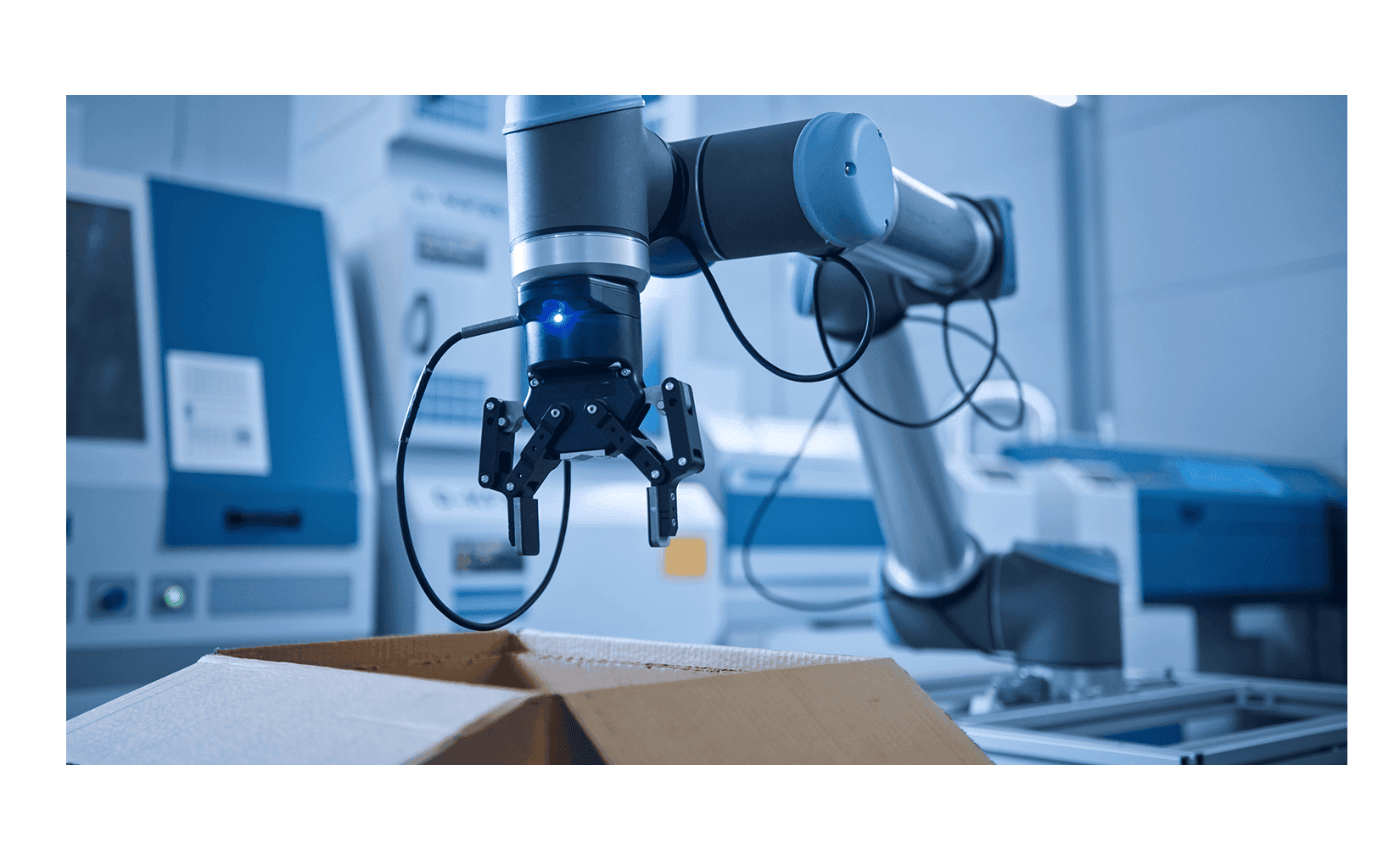
事前学習なしで0.1秒でピッキング 99%の成功率を誇るシステム「ANY PICKER」の提供を開始
クリップ機能を活用しましょう!
サインインした状態で「いいね」を押すと、マイページの
「いいね履歴」に一覧として保存されていくので、
再度読みたくなった時や、あとでじっくり読みたいときに便利です。
「いいね履歴」に一覧として保存されていくので、
再度読みたくなった時や、あとでじっくり読みたいときに便利です。
クリップ機能を活用しましょう!
サインインした状態で「いいね」を押すと、マイページの
「いいね履歴」に一覧として保存されていくので、
再度読みたくなった時や、あとでじっくり読みたいときに便利です。
「いいね履歴」に一覧として保存されていくので、
再度読みたくなった時や、あとでじっくり読みたいときに便利です。
 Ledge.ai 編集部
Ledge.ai 編集部Ledge.ai編集部です。最新のAI関連技術、テクノロジー、AIのビジネス活用事例などの情報を毎日発信しています。


関連記事
関連する記事が見つかりませんでした

アクセスランキング
中国の裁判所、偽ウルトラマン画像の生成AI事業者に著作権侵害で20万円の賠償命令ーー AI生成コンテンツの著作権侵害に関する中国初の裁判
GMO、生成AIを活用して業務時間10万6,000時間を創出 有料ツールの利用状況トップ10も発表
LoRA(ローラ)とは|今年注目の画像生成AI (Stable Diffusion) のファインチューニングを試してみた
賞金総額は20万ドル以上 クリエータープラットフォームFanvueがAI美人コンテスト「Miss AI」開催
経産省が国内AIスパコン整備に725億円の助成 さくらインターネット、GMO、KDDIなど5社
自動作曲ができる音楽生成AI「Udio」パブリックベータ版公開 誰でも無料で月1200曲まで高品質な楽曲を生成できる
自民党「キャッチコピーはAIが提案」新ポスター発表記者会見で「自民党AI」を披露 複数モデルを選択でき、API連携で利用
AI(人工知能)の歴史|時系列で簡単解説
AppleがスマートフォンのUI画面を認識できるマルチモーダルLLM「Ferret-UI」に関する論文を発表
Adobe Premiere Proで「Sora」が使える! 年内にもOpenAI、Runwayなどのビデオ生成モデルを統合すると発表
